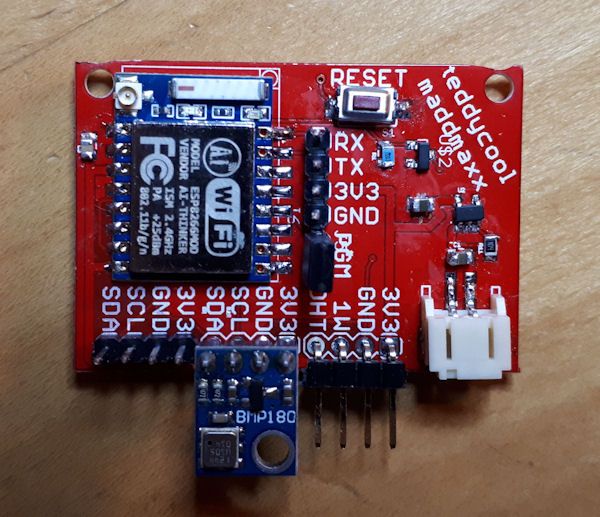
Idag har jag bara varit inne och mest pysslat med mitt ESP8266 projekt. Jag beställde för en tid sedan version 2 av kretskortet och försökte idag få det att funka. Det blev en hel del huvudbry men till slut så gick det efter att jag modifierat kortet på 2 ställen. Nu återstår att få programvaran att funka och framförallt att kunna ladda ner den… Nu ser jag också att det inte finns någon projektlista för detta projekt men det får jag ändra på vad det lider… Detta project på Github.
Jag har brottats nu också en hel del med utvecklingsmiljön. Jag får ju installera om allting allteftersom jag behöver det eftersom min hårddisk helt plötsligt lade av för några veckor sedan och ALLT på den försvann utan att jag kunde rädda en enda fil…
En annan sak jag pysslat lite med idag är HolkCam3 och då själva holken som fått fler sensorer och en annan upphängningsanordning.
ESP8266 med strömförsörjning som från ett 3.7V LiPo batteri omvandlar spänningen till 3.3V som driver mikroprocessorn och sensorerna. Tanken är att den ska kunna vara i ’deep sleep’ och då också stänga av matningen till sensorerna.
I går var det dags för MiniHack igen. En kul tillställning för mig och några andra nördar som träffas under en dag och jobbar med olika hobbyprojekt. Jag kom en bra bit framåt när det gäller strukturen och maskineriet för DartScore! Ett annat av mina projekt visades med projektor på en stor duk, nämligen direktsändning från holken. Där var det också full fart!
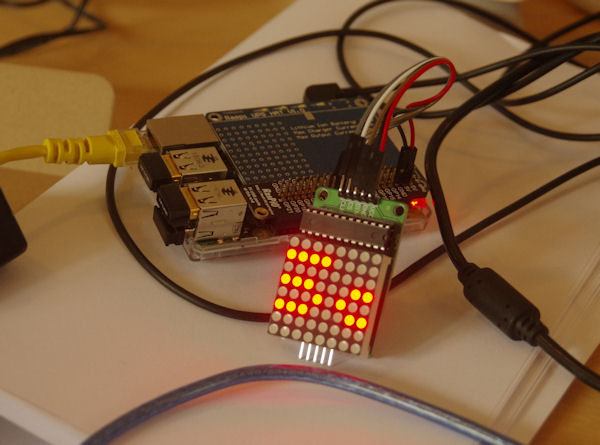
Några av projekten det jobbades med:
Raspberry Pi och en 8×8 LED matris
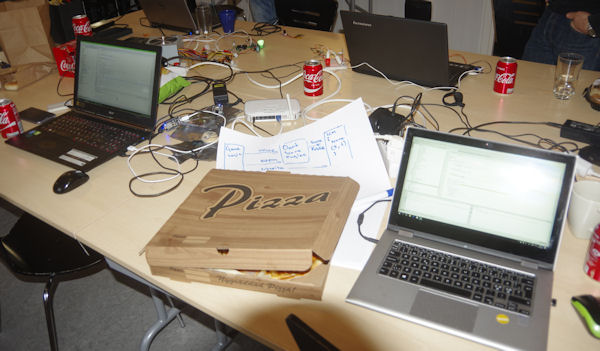
Mat ska man också ha. Pizza från Huddinge Pizza-butik har blivit tradition. Under kartongen finns lite skisser till DartScore.
För min del har det varit en slö-helg i bemärkelsen att jag knappt varit ut mer än med soporna… Istället har jag i sakta mak nördat ner mig i diverse programmering för blåmeskameran och serverdelarna till det projektet.
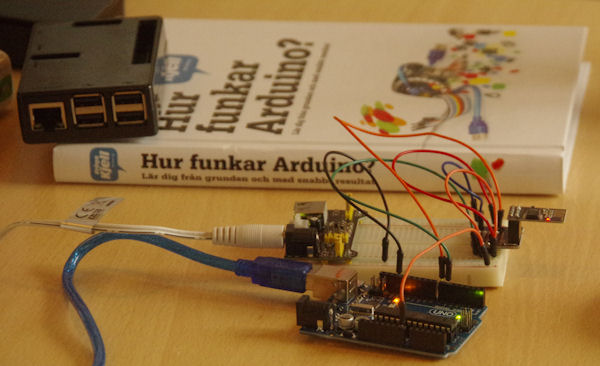
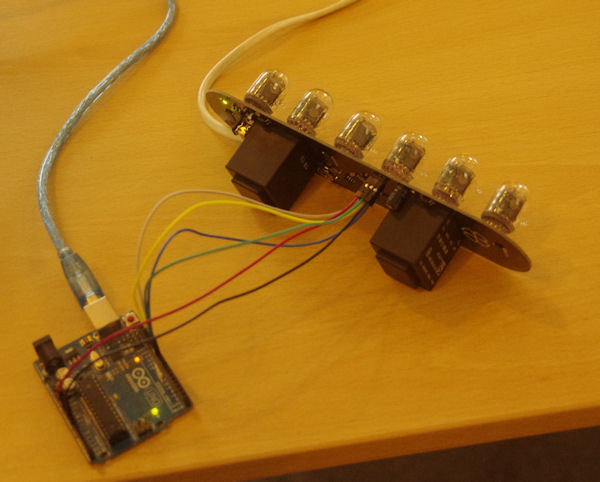
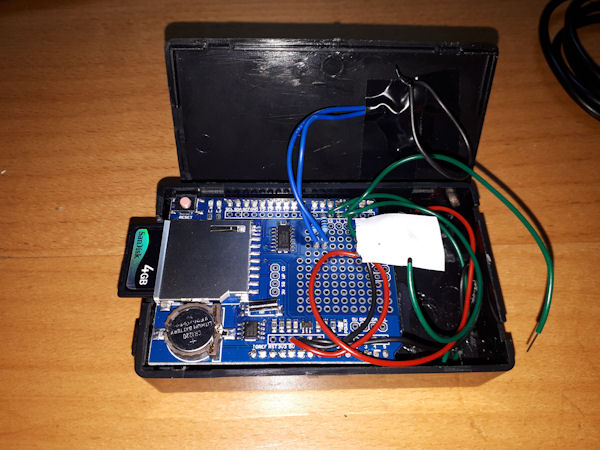
Idag har jag också börjat med ett nytt projekt eftersom jag inte har så många på g 🙂 Projektet i fråga är en temperatur-logger som jag tänkte sätta upp i stugan för att mäta temperaturen inne, ute och under huset där vattnet kommer in. Dessutom ska den mäta temperaturen i själva lådan också.
Idag byggde jag ihop det mesta av hårdvaran och har även börjat med programvaran. Det är en Arduino Uno med en ’logger’-shield, ett SD-kort, en klocka (RTC) och lite annat och som jag också kan ansluta tre yttre temperaturgivare till.
Nu väntar jag på några kontakter från Electrokit för att kunna göra det klart. Kanske hinner jag med innan torsdag då det bär av mot Öland nästa gång. Annars blir det väl fler chanser…
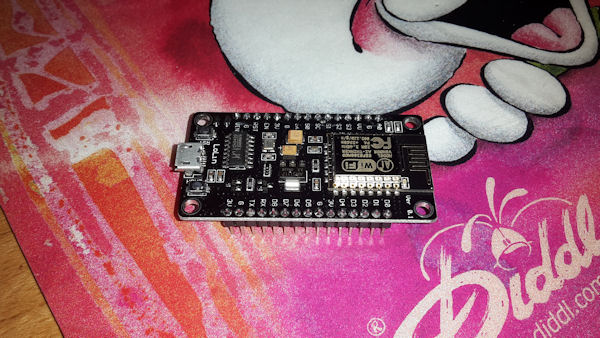
Idag har jag labbat med en utvecklingsversion av ESP8266-12E. Syftet var att få OTA (over the air update) att fungera. Det är himla smidigt att kunna byta mjukvara utan att använda en programmerare och koppla in datorn varje gång. Jag bygger ju en del nätverksanslutna småsaker (termometer tex) och ibland är det ju något som blir fel i mjukvaran eller som man vill ändra av någon annan anledning…
Allt gick bra och det fungerade en stund. Tills dess att några pinnar blev kortslutna när den hamnade på mitt stökiga bord och kom i kontakt med nåt ledande. En rökpelare och en frän lukt tipsade om att något inte stod rätt till. Tyvärr dog den helt så det var bara till att beställa några nya.
Lessons learned: Håll till på det isolerade skrivbordsunderlägget och röj av det från skräp innan arbetet börjar.
Hobbyprojekten går vidare och nu i helgen har jag jobbat med två stycken, dels ’folkrace-buggyn’ och dels ett nytt som nog är lite hemligt…
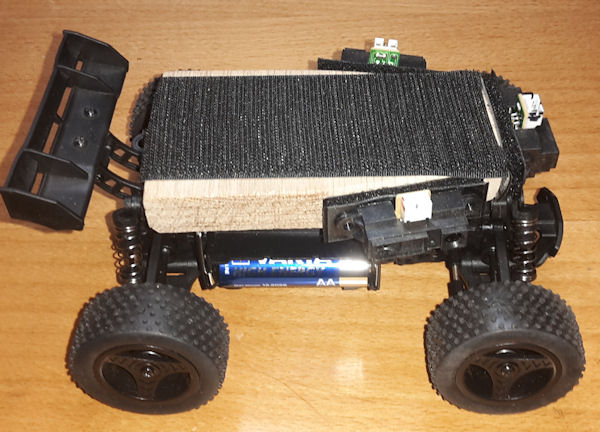
Buggyn har fått en liten plattform för montering av sensorer, styrsystem och annat. Snart kan jag provköra den men det saknas fortfarande lite kontaktdon, en huvudströmbrytare och programvara men det ska jag jobba vidare med strax…
Plattform för sensorerna och styrsystem mm. Kardborreband som är självhäftande är bra grejer 🙂
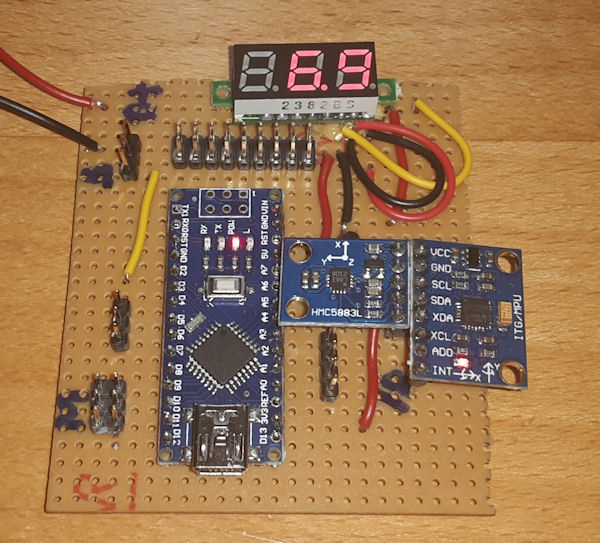
Nu har den autonoma buggyn fått en första prototyp på ett styrsystem. Åtminstone hårdvaran. Hjärnan är en Arduino Nano och på kortet sitter en voltmeter som visar batterispänningen och kontakter för IR-sensorer, motorstyrning, startsignal, servot och en I2C-buss. Jag lödde ihop det nyss och det verkar funka. Ingen rök när man ansluter spänningen 🙂
Styrsystemet. Kontakten för I2C-bussen har plats för två givare och där sitter nu en kompass och en accelerometer/gyro.
Detta projekt ska bli ett autonomt fordon med ett chassi från en radiostyrd bil som bas. Chassit är 4-hjulsdrivet och har en 6V motor som drivning. Styrsystemet är en Arduino Nano och den kommer att ha några IR-sensorer för avståndsmätning, en accelerometer och kompass för att märka om den slår runt och sedan kanske någon mer sensor. Strömförsörjningen blir från början 4 vanliga AA-batterier eller mitt nätaggregat.
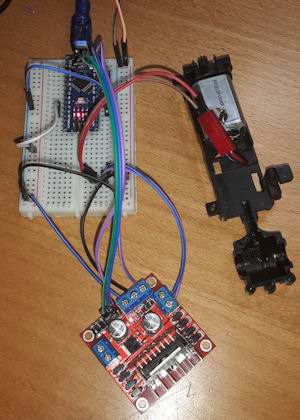
Steg 1, test av motorstyrningen
Kopplingsdäcket med Arduinon och ansluten H-brygga och motor. Motorn matas nu från mitt nätaggregat.
Jag tog loss motormodulen i chassit och körde motorn via en H-brygga och styrning från Arduino Nano. Det fungerade direkt.
int IN1=8;
int IN2=9;
int ENA=3;
void setup()
{
pinMode(IN1,OUTPUT);
pinMode(IN2,OUTPUT);
}
void loop()
{
analogWrite(ENA, 200);// motor speed
digitalWrite(IN1,LOW);// rotate forward
digitalWrite(IN2,HIGH);
delay(2000);
digitalWrite(IN1,HIGH);// rotate reverse
digitalWrite(IN2,LOW);
delay(2000);
}
Steg 2, test av mini-servot
Jag lät även Arduino Nano provköra kod för att styra servot. Även detta funkade felfritt med den exemplekod jag hittade.
#include <Servo.h>
int IN1=8;
int IN2=9;
int ENA=3;
int SERVO = 7;
int START=4; //start race via the remote
int KILL=5; //cut power to the motor
// analog inputs from ir-sensors
// analog input from US sensor
// i2c bus, accelerometer and compass
Servo myservo; // create servo object to control the servo
int pos = 0; // variable to store the servo position
void setup()
{
pinMode(IN1,OUTPUT);
pinMode(IN2,OUTPUT);
myservo.attach(SERVO);
}
void loop()
{
setSpeed(255);
forward();
for (pos = 0; pos <= 180; pos += 1) { // goes from 0 degrees to 180 degrees
// in steps of 1 degree
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
setSpeed(150);
reverse();
for (pos = 180; pos >= 0; pos -= 1) { // goes from 180 degrees to 0 degrees
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
}
void setSpeed(int speed)
{
analogWrite(ENA, speed); // motor speed
}
void forward()
{
digitalWrite(IN1,LOW);// rotate forward
digitalWrite(IN2,HIGH);
}
void reverse()
{
digitalWrite(IN1,HIGH);// rotate reverse
digitalWrite(IN2,LOW);
}
void setServo(int POS){
myservo.write(POS);
}
Nästa steg blir att sätta ihop chassit igen med riktiga kullager och en vanlig bakaxel. Parallellt funderar jag på hur ett kretskort ska se ut för att koppla ihop de olika delarna. Jag vill kunna ansluta varje del för sig så att det är lätt att byta ut om det behövs. Någon form av ’moderkort’ med stift för resp. komponent kanske…
Jag ska även skapa ett nytt github projekt så fort jag får ihop lite ’riktig’ kod.
Steg 3, nya kullager
Pyttesmå hjullager…
Nu har chassit fått riktiga kullager till alla hjul. Det var pilligt att få dit dom men det gick till slut.
Jag har även riktiga kullager till diffarna och drivaxeln men dom har jag inte bytt ännu.
Tyvärr fattas det lite delar för att jag ska kunna sätta ihop chassit helt men det får jag fixa på nåt sätt.
Bakaxeln utan övre reaktionsstag. Dom jag hade var lite för korta.
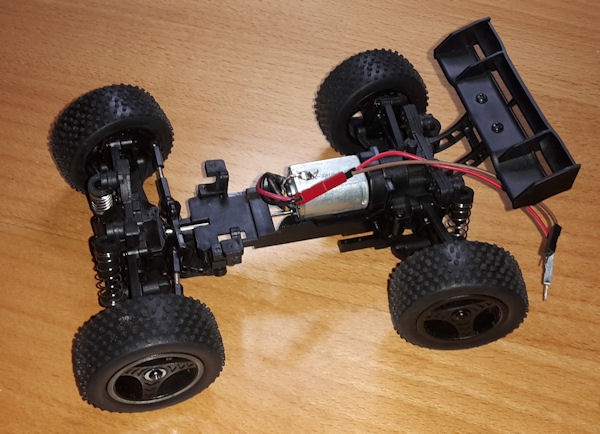
Steg 4, Chassit komplett
Nu är chassit komplett med alla hjul och hel ’drivlina’. Även framaxeln och styrningen är ihopsatt men servo-länkaget saknas fortfarande. Nu kan jag börja göra lite prototypdetaljer, tex kretskort i väntan på att ir-sensorer ska dyka upp i brevlådan.
Chassit med arduino nano (ovanpå) och en motorstyrningskrets.
Steg 5, styrsystemet
Bilden visar första prototypen på styrsystemet.
Styrsystemet med kontakter för Servo, motorstyrning, IR-sensorer, startsignal och en I2C-buss. Kontakten för I2C-bussen har plats för två givare och där sitter nu en kompass och en accelerometer/gyro.
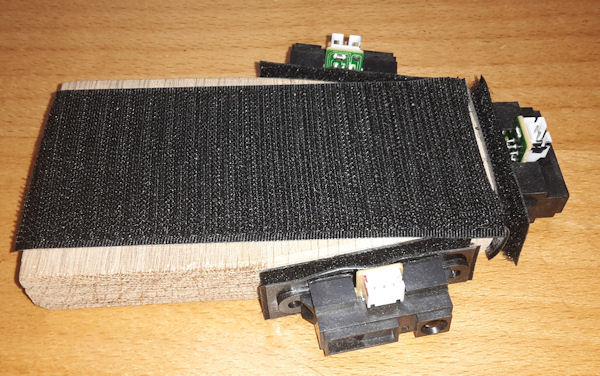
Steg 6, Plattformen
Nu finns en första prototyp på ’plattformen’ dvs det som ska hålla allt på plats. Jag valde att göra den av en bit hyllplan som jag hade liggande. Den är i ek så det är stadigt, hårt och bra men kanske lite för tungt. För montering av sensorer och kretskort använder jag kardborreband som är självhäftande. Det är nästan lika underskattat som smältlim…
Plattformen med monterade sensorer.
Nu kan jag sätta ihop alltihopa men kan inte ansluta strömförsörjningen ännu pga att jag saknar några kontakter och en strömbrytare. Såå fort jag får ordning på det så ska jag göra ett litet testprogram som kör fram och tillbaka bara för att se hur fort den går.
En annan sak som saknas är servolänkaget. Servot inklusive styrningen fungerar men inte den lilla biten emellan.
Nu börjar det likna något. Nästa steg är en provkörning.
Steg 7, Ett första test
Upp-pallad på en ask med batterier så kör den mha av Arduino-koden som nu finns på GitHub. Den saknar fortfarande ett servo-länkage men det ska jag försöka fixa snarast så att jag sedan kan börja prova på riktigt.
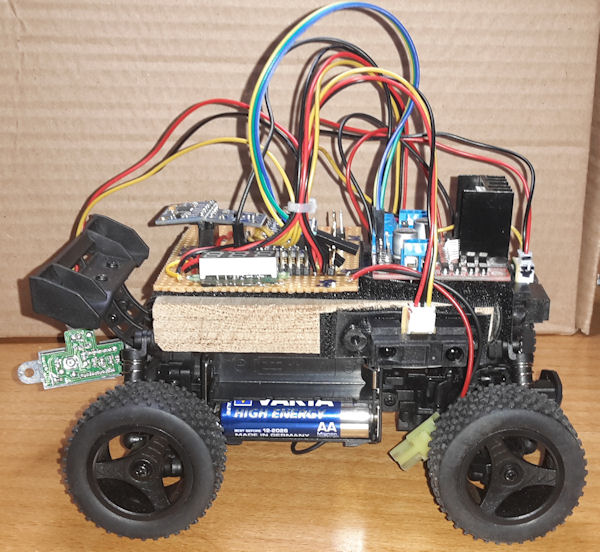
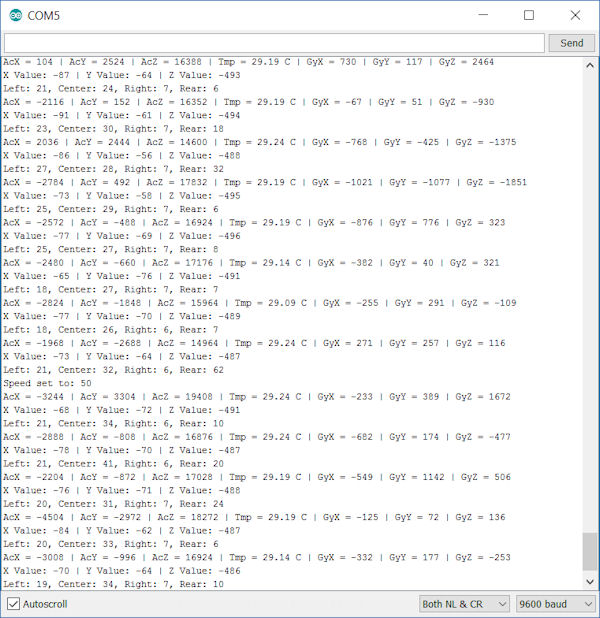
Steg 8, Hårdvaran fungerar
Nytt test. Denna gång med fungerande servolänkage och kod som nu också vrider på framhjulen. Allt sensordata läses in och skickas till seriekanalen så nu kan jag se vad som händer och snart fortsätta implementeringen av själva ’föraren’.
Jag har börjat på ytterligare ett hobbyprojekt. Behöver jag fler kan man undra men det finns mycket som är roligt att hålla på med…
Det handlar om att bygga en ’autonom’ liten bil och jag köpte ett chassi av en arbetskompis som kommer från en radiostyrd bil i skala 1:24. Detta ska sedan byggas på med en arduino nano, lite sensorer och diverse andra prylar för att kunna köra själv. Som tur är finns det en marknad för reservdelar även till dessa småbilar så det går att komplettera med det jag behöver.
Chassit helt avplockat. Detta chassi är 4WD och även styrning på bakaxeln men det plockar jag nog bort. Lite nya kullager och kugghjul behövs nog också innan det blir riktig fart på den.
Accesspunkten. Baksidan kommer att förses med lite kardborreband så den går lätt att sätta fast i tex bilen.
Nu är jag på Öland men jag fick med mig en liten plastlåda med Raspberry Pi och Arduino prylar. En av prylarna är en Raspberry Pi med två wlan gränssnitt. Den ska agera dels som en accesspunkt för ett lokalt trådlöst nät men också koppla upp sig mot internet via min mobil. Det var lite problem att få det och fungera men idag gick det till slut. Tanken är att den ska kunna sitta i tex bilen och ha några andra Raspberry Pis och en läsplatta i det lokala nätet som pratar med varandra och där samtliga har tillgång även till internet.
Jag har även uppdaterat ’camdevice’ så att den fungerar till detta nya nätverk.
I övrigt har ’sommarhacket’ hittills även bestått i att åka och handla brädor och börja bygga ett räcke för trappan till det lilla huset. Jag gjorde ett räcke till stora stugan när jag var här tidigare i våras och nu blir det alltså till att klona det till det andra huset.
Min vana trogen när jag är på Öland var jag uppe tidigt i morse och åkte ut för att fotografera. I Trollskogen stötte jag bland annat på en Gärdsmyg som sjöng väldigt energiskt.
Idag hämtade jag ut ett litet paket från Electrokit med lite kul prylar:
2 st Arduino Uno, en bok med lite inspiration och en låda till Raspberry Pi som är ’Lego.kompatibel’.
Jag har ju mest gjort projekt med Raspberryn men tänkte prova lite Arduino också, kul med omväxling 🙂
Jag kunde inte hålla mig borta från ebay idag heller så nu ligger det antal transistorer i min köphistorik också. En nackdel med ebay är ju att det tar ett tag att få prylarna men å andra sidan så blir det ibland lilla julafton när dom väl dyker upp då jag beställer saker som jag tror är bra att ha och sedan nästan glömmer bort det innan dom dyker upp…






 Idag hämtade jag ut ett litet paket från
Idag hämtade jag ut ett litet paket från 






Senaste kommentarer